如何调整焊接机器人的工作缺陷:一、冷却后形成一个弧坑,在编程过程中将淹没弧坑功能添加到操作步骤以填充它。二、飞溅过多可能是由于焊接参数选择不当,气体成分原因或焊丝的外部伸长过长所致。您可以调整功率大小以更改焊接参数,调整气体比例器以调整混合气体份额,并调整焊抢和工件的相对方向。三、气孔可能是由于气体维护不良,工件的底漆太厚或维护气体不闷造成的,可以进行相应的调整。
点焊一直被用于连接两个薄型板材部件,并且无需通常的焊缝。通过电流,工件的一个小面积上将汇聚很高的能量。然后通过很高的压紧压力完成不可解除的连接。整个工艺仅需要几分之一秒,它易于操作并且不需要额外的添加料,济宁自动码垛机器手,比如气体或金属丝,可以轻松地实现自动化。
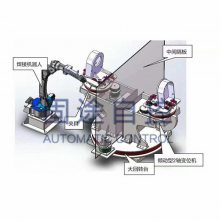
点焊机器人系统作为一个灵活、独立、通用的点焊柔性焊接加工单元主要用于低碳钢、合金钢及有色金属的焊接。因此它可以理想地应用于比如汽车车身的大批量生产或大型板材的多点焊接工站中。但接合位置必须能从两侧接触到。这对于库卡机器人来说***:为此所需的焊接钳作为机器人的工具构成了一个真正的用于持久接合的加工单元。
焊接机器人的优势和原理:1、更为宽广的动作范围。通过扩大了各个轴的动作范围,在提升了覆盖范围的同时扩大了机器人下方的动作范围,自动码垛机器手直销,从而使得操作空间有了扩展。2、更好的适应环境性。焊接机器人各关节部采用了全新的双层密封构造的防水插口,自动码垛机器手哪家好,使得手腕部分的防护等级达到提升。焊接机器人电气控制系统一般由继电器、PLC可编程控制器、单片机、数控系统、计算机组成。电气控制系统主要控制夹具的装夹和定位,焊机的启动和停止,输送装置的进出等等。