如何调整焊接机器人的工作缺陷:一、冷却后形成一个弧坑,在编程过程中将淹没弧坑功能添加到操作步骤以填充它。二、飞溅过多可能是由于焊接参数选择不当,气体成分原因或焊丝的外部伸长过长所致。您可以调整功率大小以更改焊接参数,调整气体比例器以调整混合气体份额,搬运机器人价格,并调整焊抢和工件的相对方向。三、气孔可能是由于气体维护不良,搬运机器人,工件的底漆太厚或维护气体不闷造成的,可以进行相应的调整。
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
◆ 性能特点:
(1)可编程。生产自动化的进一步发展是柔性启动化。工业机器人可随其工作环境变化的需要而再编程,搬运机器人厂家,因此它在小批量多品种具有均衡的柔性制造过程中能发挥很好的功用,是柔性制造系统中的一个重要组成部分。
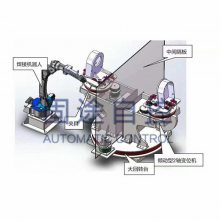
焊接机器人工作站的结构组成:1、焊接变位机。焊接变位机作为常见的焊接辅助设备,根据轴数不同,可实现360°翻转或者120°回转,并且根据负载能力不同,可以满足不同领域工件的承载,搬运机器人公司,***在承载范围内实现稳定翻转,工作台中配置固定孔,可以将工件进行固定回转和翻转,提高稳定性,焊接变位机和焊接机器人能够实现协调运动。